Oxford Aerospace Research Centre

RESEARCH
Avianco Unmanned Traffic Management System (UTM)
AVIANCO UTM
Avianco’s digital cloud based Unmanned Traffic Management (UTM) designed for the next generation of air traffic management. Integration and development of custom applications using the Avianco UTM framework and web API.
- Compliance with Airspace Regulation
- Route Planning and Re-Routing
- Dynamic Geofencing
- Congestion Management & Terrain Avoidance
- Severe-Weather Redirection
- Contingency Management
- Separation Management
- Sequencing and Spacing
AVIANCO UTM
RESEARCH
Flight Information Management System (FIMS)
Flight Information Management System (FIMS)
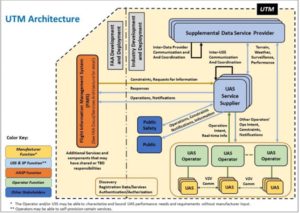
Research in aviation data exchange hub to connect air traffic management systems to U-Space Service Providers (USSPs) with open interfaces to support safe and compliant drone operations in low-altitude airspace. The FIMS is a cloud-based, interoperable platform that distributes airspace information, directives, and real-time traffic from ATM systems to drone operators through a network of USSPs.
Research into a flight information management system with platform connectivity to tactical and commercial information sources. Integration of military and commercial applications and on-board data links. Air crew integrated connectivity for traffic awarenes during UAV operation.
- UAV and piloted aircraft position (en-route, arrival, departure)
- Information on obstacles, and geographical and political borders
- Real-time graphical and text-based weather updates
- Paperless filing
Flight Information Management System (FIMS)
EXPRESSION OF INTEREST
Collaborative Research